
Разработка мобильной телеуправляемой робототехнической плавучей платформы для осуществления диагностики технического состояния подводного перехода магистрального газопровода
Разработка
ID
AL13-2UP7
Пользователь
Категория
B - различные технологические процессы; транспортирование
Опубликован
03.12.2024 14:34
Описание
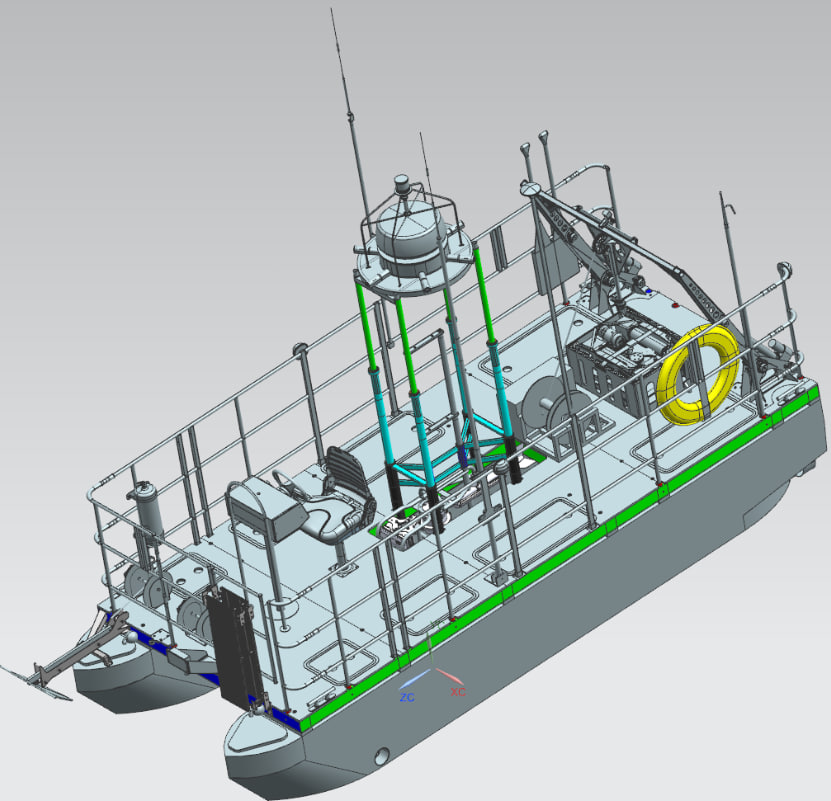
Проект направлен на разработку опытного образца мобильной телеуправляемой робототехнической плавучей платформы (МТРПП) для диагностики технического состояния подводных магистральных газопроводов (ПП МГ). В условиях активного развития использования робототехнических платформ в подводных работах, особенно в нефтегазовой отрасли, проект ставит своей целью повысить безопасность и эффективность обследо
vaniy, kotorie v nastoyashtee vremya provodyatsya s ispolyzovaniem vodolazov i trebuyut znachitelynih zatrat. MTRPP budet upravlyatysya operatorami s borta sudna ili berega, obespechivaya avtomatizirovanniy sbor i obrabotku dannih o tehnicheskom sostoyanii gazoprovodov i ih okruzhenii s pomoshtyyu podvodnogo teleupravlyaemogo robota, chto pozvolit sokratity riski, svyazannie s prirodno-klimaticheskimi yavleniyami i potentsialynimi utechkami.
Aktualynosty proekta - v nastoyashtee vremya nablyudaetsya rastushtaya potrebnosty v razrabotke robototehnicheskih platform dlya vipolneniya podvodnih rabot, kotorie upravlyayutsya operatorami s sudna ili berega. Oni nahodyat shirokoe primenenie v okeanologii, morskoy kartografii, issledovanii zatonuvshih sudov i podvodnih chastey truboprovodov. V neftegazovoy otrasli, gde trebuetsya osoboe vnimanie k diagnostike gazoprovodov, osobenno na podvodnih perehodah, traditsionnie metodi obsledovaniya, vklyuchaya vodolaznie raboti, yavlyayutsya visokozatratnimi i nebezopasnimi. Dlya resheniya etih problem, razrabotka mobilynoy teleupravlyaemoy robototehnicheskoy plavuchey platformi (MTRPP) yavlyaetsya osobenno aktualynoy, ona pozvolit provodity distantsionnuyu diagnostiku sostoyaniya gazoprovodov, minimiziruya riski dlya issledovatelyskoy gruppi i snizhaya zatrati na obsledovanie.
Sushtestvuyushtiy zadel – v RF sushtestvuet neskolyko postavshtikov uslug i proizvoditeley shozhih po funktsionalu robototehnicheskih platform, rasschitannih na vipolnenie distantsionnogo obsledovaniya, kontrolya i vipolneniya podvodnih rabot v neftegazovoy promishlennosti. Robototehnicheskie platformi, imeyushtiesya na rinke imeyut glubinu pogruzheniya do 1000m, gruzopodaemnosty do 32kg, sposobnosty izmeryaty planovoe i visotnoe polozhenie trub, sostoyanie izolyatsionnogo pokritiya, sostoyanie beregoukrepleniya, vipolnyaty gidrolokatsionnuyu saiomku. Tem ne menee MTRPP ANO VO «Universitet Innopolis» imeet ryad sushtestvennih preimushtestv.
vaniy, kotorie v nastoyashtee vremya provodyatsya s ispolyzovaniem vodolazov i trebuyut znachitelynih zatrat. MTRPP budet upravlyatysya operatorami s borta sudna ili berega, obespechivaya avtomatizirovanniy sbor i obrabotku dannih o tehnicheskom sostoyanii gazoprovodov i ih okruzhenii s pomoshtyyu podvodnogo teleupravlyaemogo robota, chto pozvolit sokratity riski, svyazannie s prirodno-klimaticheskimi yavleniyami i potentsialynimi utechkami.
Aktualynosty proekta - v nastoyashtee vremya nablyudaetsya rastushtaya potrebnosty v razrabotke robototehnicheskih platform dlya vipolneniya podvodnih rabot, kotorie upravlyayutsya operatorami s sudna ili berega. Oni nahodyat shirokoe primenenie v okeanologii, morskoy kartografii, issledovanii zatonuvshih sudov i podvodnih chastey truboprovodov. V neftegazovoy otrasli, gde trebuetsya osoboe vnimanie k diagnostike gazoprovodov, osobenno na podvodnih perehodah, traditsionnie metodi obsledovaniya, vklyuchaya vodolaznie raboti, yavlyayutsya visokozatratnimi i nebezopasnimi. Dlya resheniya etih problem, razrabotka mobilynoy teleupravlyaemoy robototehnicheskoy plavuchey platformi (MTRPP) yavlyaetsya osobenno aktualynoy, ona pozvolit provodity distantsionnuyu diagnostiku sostoyaniya gazoprovodov, minimiziruya riski dlya issledovatelyskoy gruppi i snizhaya zatrati na obsledovanie.
Sushtestvuyushtiy zadel – v RF sushtestvuet neskolyko postavshtikov uslug i proizvoditeley shozhih po funktsionalu robototehnicheskih platform, rasschitannih na vipolnenie distantsionnogo obsledovaniya, kontrolya i vipolneniya podvodnih rabot v neftegazovoy promishlennosti. Robototehnicheskie platformi, imeyushtiesya na rinke imeyut glubinu pogruzheniya do 1000m, gruzopodaemnosty do 32kg, sposobnosty izmeryaty planovoe i visotnoe polozhenie trub, sostoyanie izolyatsionnogo pokritiya, sostoyanie beregoukrepleniya, vipolnyaty gidrolokatsionnuyu saiomku. Tem ne menee MTRPP ANO VO «Universitet Innopolis» imeet ryad sushtestvennih preimushtestv.